Development Messages¶
Target¶
Target.
- Abbreviation: Target
- Identification Number: 800
- Payload Size: 31+ bytes
- Message Size: 53+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Label | label | - | plaintext | Target identifier. | Same as field type |
| Latitude WGS-84 | lat | rad | fp64_t | WGS-84 Latitude coordinate. | min=-1.5707963267948966, max=1.5707963267948966 |
| Longitude WGS-84 | lon | rad | fp64_t | WGS-84 Longitude coordinate. | min=-3.141592653589793, max=3.141592653589793 |
| Z Reference | z | m | fp32_t | Z axis reference. Use z_units to specify whether z represents depth, altitude or other. | Same as field type |
| Z Units | z_units | Enumerated (Enum Z Units) | uint8_t | Units of the z reference. | Same as field type |
| Course Over Ground | cog | rad | fp32_t | Course Over Ground (true). | Same as field type |
| Speed Over Ground | sog | m/s | fp32_t | Speed Over Ground. | Same as field type |
EntityParameter¶
Entity parameter.
- Abbreviation: EntityParameter
- Identification Number: 801
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Name | name | - | plaintext | Name of the parameter. | Same as field type |
| Value | value | - | plaintext | Current value of the parameter. | Same as field type |
EntityParameters¶
List of entity parameters.
- Abbreviation: EntityParameters
- Identification Number: 802
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Name of the entity. | Same as field type |
| Parameters | params | - | message-list (EntityParameter) | List of parameters. | Same as field type |
QueryEntityParameters¶
No description
- Abbreviation: QueryEntityParameters
- Identification Number: 803
- Payload Size: 6+ bytes
- Message Size: 28+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type | |
| Visibility | visibility | - | plaintext | Same as field type | |
| Scope | scope | - | plaintext | Same as field type |
SetEntityParameters¶
No description
- Abbreviation: SetEntityParameters
- Identification Number: 804
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type | |
| Parameters | params | - | message-list (EntityParameter) | Same as field type |
SaveEntityParameters¶
No description
- Abbreviation: SaveEntityParameters
- Identification Number: 805
- Payload Size: 2+ bytes
- Message Size: 24+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
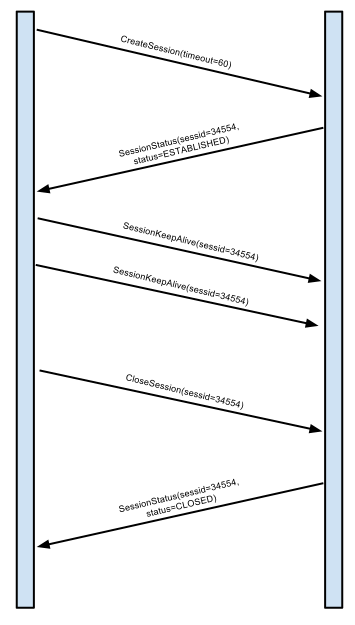
Create Session¶
Request creating a new session with this remote peer. Example session sequence is shown in the following diagram.
| align: | center |
|---|
- Abbreviation: CreateSession
- Identification Number: 806
- Payload Size: 4 bytes
- Message Size: 26 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Timeout | timeout | - | uint32_t | Session timeout, in seconds. If no messages are received from the remote peer, the session will be closed after this ammount of seconds have ellapsed. | Same as field type |
Close Session¶
Request closing of an ongoing session
- Abbreviation: CloseSession
- Identification Number: 807
- Payload Size: 4 bytes
- Message Size: 26 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type |
Session Subscription¶
No description
- Abbreviation: SessionSubscription
- Identification Number: 808
- Payload Size: 6+ bytes
- Message Size: 28+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type | |
| Messages to subscribe | messages | - | plaintext | Comma-separated list of messages to subscribe. Example: “EstimatedState,EulerAngles,Temperature” | Same as field type |
Session Keep-Alive¶
Message exchanged to prevent a session from timing out
- Abbreviation: SessionKeepAlive
- Identification Number: 809
- Payload Size: 4 bytes
- Message Size: 26 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type |
Session Status¶
Message transmitted periodically to inform the state of a communication session
- Abbreviation: SessionStatus
- Identification Number: 810
- Payload Size: 5 bytes
- Message Size: 27 bytes
- Flags: periodic
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type | |
| Status | status | Enumerated (Enum Status) | uint8_t | Same as field type |
Enum Status¶
No description
- Abbreviation: status
- Prefix: STATUS
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 1 | Established | ESTABLISHED | - |
| 2 | Closed | CLOSED | - |
Push Entity Parameters¶
No description
- Abbreviation: PushEntityParameters
- Identification Number: 811
- Payload Size: 2+ bytes
- Message Size: 24+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
Pop Entity Parameters¶
No description
- Abbreviation: PopEntityParameters
- Identification Number: 812
- Payload Size: 2+ bytes
- Message Size: 24+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
I/O Event¶
Notification of an I/O event.
- Abbreviation: IoEvent
- Identification Number: 813
- Payload Size: 3+ bytes
- Message Size: 25+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Type | type | Enumerated (Enum Type) | uint8_t | Event type. | Same as field type |
| Error Message | error | - | plaintext | Human-readable error message. | Same as field type |
Enum Type¶
Event type.
- Abbreviation: type
- Prefix: IOV_TYPE
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 1 | Input Available | INPUT | - |
| 2 | Input Error | INPUT_ERROR | - |
UamTxFrame¶
No description
- Abbreviation: UamTxFrame
- Identification Number: 814
- Payload Size: 7+ bytes
- Message Size: 29+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| Destination System | sys_dst | - | plaintext | Same as field type | |
| Flags | flags | Bitfield (Bitfield Flags) | uint8_t | Same as field type | |
| Data | data | - | rawdata | Same as field type |
Bitfield Flags¶
No description
- Abbreviation: flags
- Prefix: UTF
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0x01 | Acknowledgement | ACK | - |
| 0x02 | Delayed | DELAYED | - |
UamRxFrame¶
No description
- Abbreviation: UamRxFrame
- Identification Number: 815
- Payload Size: 7+ bytes
- Message Size: 29+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Source System | sys_src | - | plaintext | Same as field type | |
| Destination System | sys_dst | - | plaintext | Same as field type | |
| Flags | flags | Bitfield (Bitfield Flags) | uint8_t | Same as field type | |
| Data | data | - | rawdata | Same as field type |
Bitfield Flags¶
No description
- Abbreviation: flags
- Prefix: URF
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0x01 | Promiscuous | PROMISCUOUS | - |
| 0x02 | Delayed | DELAYED | - |
UamTxStatus¶
No description
- Abbreviation: UamTxStatus
- Identification Number: 816
- Payload Size: 5+ bytes
- Message Size: 27+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| Value | value | Enumerated (Enum Value) | uint8_t | Same as field type | |
| Error Message | error | - | plaintext | Same as field type |
Enum Value¶
No description
- Abbreviation: value
- Prefix: UTS
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0 | Transmission Completed | DONE | - |
| 1 | Transmission Failed | FAILED | - |
| 2 | Transmission Canceled | CANCELED | - |
| 3 | Modem is busy | BUSY | - |
| 4 | Invalid address | INV_ADDR | - |
| 5 | In Progress | IP | - |
| 6 | Unsupported operation | UNSUPPORTED | - |
| 7 | Invalid transmission size | INV_SIZE | - |
UamRxRange¶
No description
- Abbreviation: UamRxRange
- Identification Number: 817
- Payload Size: 8+ bytes
- Message Size: 30+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| System | sys | - | plaintext | Same as field type | |
| Value | value | - | fp32_t | Same as field type |
Formation Control Parameters¶
Formation controller paramenters, as: trajectory gains, control boundary layer thickness, and formation shape gains.
- Abbreviation: FormCtrlParam
- Identification Number: 820
- Payload Size: 21 bytes
- Message Size: 43 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Action | Action | Enumerated (Enum Action) | uint8_t | Action on the vehicle formation control parameters. | Same as field type |
| Longitudinal Gain | LonGain | - | fp32_t | Trajectory gain over the vehicle longitudinal direction. | Same as field type |
| Lateral Gain | LatGain | - | fp32_t | Trajectory gain over the vehicle lateral direction. | Same as field type |
| Boundary Layer Thickness | BondThick | - | uint32_t | Control sliding surface boundary layer thickness. | Same as field type |
| Leader Gain | LeadGain | - | fp32_t | Formation shape gain (absolute vehicle position tracking). Leader control importance gain (relative to the sum of every other formation vehicle). | Same as field type |
| Deconfliction Gain | DeconflGain | - | fp32_t | Collision avoidance and formation shape gain (position tracking relative to the other formation vehicles). Individual vehicle importance gain (relative to the leader), when the relative position or the velocity state indicate higher probability of collision. | Same as field type |
Enum Action¶
Action on the vehicle formation control parameters.
- Abbreviation: Action
- Prefix: OP
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0 | Request | REQ | - |
| 1 | Set | SET | - |
| 2 | Report | REP | - |
Formation Evaluation Data¶
Formation control performance evaluation variables.
- Abbreviation: FormationEval
- Identification Number: 821
- Payload Size: 12 bytes
- Message Size: 34 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Mean position error | err_mean | - | fp32_t | Mean position error relative to the formation reference. | Same as field type |
| Absolute minimum distance | dist_min_abs | - | fp32_t | Overall minimum distance to any other vehicle in the formation. | Same as field type |
| Mean minimum distance | dist_min_mean | - | fp32_t | Mean minimum distance to any other vehicle in the formation. | Same as field type |
Formation Control Parameters¶
Formation controller paramenters, as: trajectory gains, control boundary layer thickness, and formation shape gains.
- Abbreviation: FormationControlParams
- Identification Number: 822
- Payload Size: 41 bytes
- Message Size: 63 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Action | Action | Enumerated (Enum Action) | uint8_t | Action on the vehicle formation control parameters. | Same as field type |
| Longitudinal Gain | lon_gain | - | fp32_t | Trajectory gain over the vehicle longitudinal direction. | Same as field type |
| Lateral Gain | lat_gain | - | fp32_t | Trajectory gain over the vehicle lateral direction. | Same as field type |
| Boundary Layer Thickness | bond_thick | - | fp32_t | Control sliding surface boundary layer thickness. | Same as field type |
| Leader Gain | lead_gain | - | fp32_t | Formation shape gain (absolute vehicle position tracking). Leader control importance gain (relative to the sum of every other formation vehicle). | Same as field type |
| Deconfliction Gain | deconfl_gain | - | fp32_t | Collision avoidance and formation shape gain (position tracking relative to the other formation vehicles). Individual vehicle importance gain (relative to the leader), when the relative position or the velocity state indicate higher probability of collision. | Same as field type |
| Acceleration Switch Gain | accel_switch_gain | - | fp32_t | Switch gain to compensate the worst case of the wind flow acceleration. | Same as field type |
| Safety Distance | safe_dist | - | fp32_t | Inter-vehicle safety distance. | Same as field type |
| Deconfliction Offset | deconflict_offset | - | fp32_t | Distance offset which defines the buffer area beyond the safety distace. | Same as field type |
| Acceleration Safety Margin | accel_safe_margin | - | fp32_t | Safety margin to compensate for possible shortfalls from the predicted maximum acceleration that a vehicle can generate. | Same as field type |
| Maximum Longitudinal Acceleration | accel_lim_x | - | fp32_t | Maximum predicted longitudinal acceleration a vehicle can generate. | Same as field type |
Enum Action¶
Action on the vehicle formation control parameters.
- Abbreviation: Action
- Prefix: OP
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0 | Request | REQ | - |
| 1 | Set | SET | - |
| 2 | Report | REP | - |
Formation Evaluation Data¶
Formation control performance evaluation variables.
- Abbreviation: FormationEvaluation
- Identification Number: 823
- Payload Size: 65 bytes
- Message Size: 87 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Type | type | Enumerated (Enum Type) | uint8_t | Indicates if the message is a request, or a reply to a previous request. | Same as field type |
| Operation | op | Enumerated (Enum Operation) | uint8_t | Operation to perform. | Same as field type |
| Mean Position Error | err_mean | - | fp32_t | Mean position error relative to the formation reference. | Same as field type |
| Absolute Minimum Distance | dist_min_abs | - | fp32_t | Overall minimum distance to any other vehicle in the formation. | Same as field type |
| Mean Minimum Distance | dist_min_mean | - | fp32_t | Mean minimum distance to any other vehicle in the formation. | Same as field type |
| Mean Roll Rate | roll_rate_mean | - | fp32_t | Mean minimum distance to any other vehicle in the formation. | Same as field type |
| Evaluation Time | time | - | fp32_t | Period over which the evaluation data is averaged. | Same as field type |
| Formation Control Parameters | ControlParams | - | message (Formation Control Parameters) | Formation controller paramenters during the evaluation period. | Same as field type |
Enum Type¶
Indicates if the message is a request, or a reply to a previous request.
- Abbreviation: type
- Prefix: FC
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0 | Request | REQUEST | - |
| 1 | Report | REPORT | - |
Enum Operation¶
Operation to perform.
- Abbreviation: op
- Prefix: OP
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 0 | Start | START | Start the formation maneuver. |
| 1 | Stop | STOP | Stop the formation maneuver. |
| 2 | Ready | READY | Stop the formation maneuver. |
| 3 | Executing | EXECUTING | Stop the formation maneuver. |
| 4 | Failure | FAILURE | Stop the formation maneuver. |
SOI Waypoint¶
No description
- Abbreviation: SoiWaypoint
- Identification Number: 850
- Payload Size: 14 bytes
- Message Size: 36 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Latitude | lat | ° | fp32_t | Same as field type | |
| Longitude | lon | ° | fp32_t | Same as field type | |
| Time Of Arrival | eta | - | uint32_t | Same as field type | |
| Duration | duration | s | uint16_t | Same as field type |
SOI Plan¶
No description
- Abbreviation: SoiPlan
- Identification Number: 851
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Plan Identifier | plan_id | - | uint16_t | Same as field type | |
| Waypoints | waypoints | - | message-list (SOI Waypoint) | Same as field type |
SOI Command¶
No description
- Abbreviation: SoiCommand
- Identification Number: 852
- Payload Size: 12+ bytes
- Message Size: 34+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Type | type | Enumerated (Enum Type) | uint8_t | Same as field type | |
| Command | command | Enumerated (Enum Command) | uint8_t | Same as field type | |
| Settings | settings | TupleList | plaintext | Same as field type | |
| Plan | plan | - | message (SOI Plan) | Same as field type | |
| Extra Information | info | - | plaintext | Same as field type |
Enum Type¶
No description
- Abbreviation: type
- Prefix: SOITYPE
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 1 | Request | REQUEST | - |
| 2 | Success | SUCCESS | - |
| 3 | Error | ERROR | - |
Enum Command¶
No description
- Abbreviation: command
- Prefix: SOICMD
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 1 | Execute Plan | EXEC | - |
| 2 | Stop Execution | STOP | - |
| 3 | Set Parameters | SET_PARAMS | - |
| 4 | Get Parameters | GET_PARAMS | - |
| 5 | Get Plan | GET_PLAN | - |
| 6 | Resume Execution | RESUME | - |
SOI State¶
No description
- Abbreviation: SoiState
- Identification Number: 853
- Payload Size: 6 bytes
- Message Size: 28 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| State | state | Enumerated (Enum State) | uint8_t | Same as field type | |
| Plan Identifier | plan_id | - | uint16_t | Same as field type | |
| Waypoint Identifier | wpt_id | - | uint8_t | Same as field type | |
| Settings Checksum | settings_chk | - | uint16_t | Same as field type |
Enum State¶
No description
- Abbreviation: state
- Prefix: SOISTATE
| Value | Name | Abbreviation | Description |
|---|---|---|---|
| 1 | Executing | EXEC | - |
| 2 | Idle | IDLE | - |
| 3 | Inactive | INACTIVE | - |
Message Fragment¶
No description
- Abbreviation: MessagePart
- Identification Number: 877
- Payload Size: 5+ bytes
- Message Size: 27+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Transmission Unique Id | uid | - | uint8_t | Same as field type | |
| Fragment Number | frag_number | - | uint8_t | Same as field type | |
| Total Number of fragments | num_frags | - | uint8_t | Same as field type | |
| Fragment Data | data | - | rawdata | Same as field type |
Neptus Blob¶
No description
- Abbreviation: NeptusBlob
- Identification Number: 888
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| ContentType | content_type | - | plaintext | Same as field type | |
| Content | content | - | rawdata | Same as field type |
Aborted¶
This message signals that an Abort message was received and acted upon.
- Abbreviation: Aborted
- Identification Number: 889
- Payload Size: 0 bytes
- Message Size: 22 bytes
This message has no fields.
USBL Angles¶
This message contains information, collected using USBL, about the bearing and elevation of a target.
- Abbreviation: UsblAngles
- Identification Number: 890
- Payload Size: 10 bytes
- Message Size: 32 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | uint16_t | Target’s IMC address. | Same as field type |
| Bearing | bearing | rad | fp32_t | Target’s bearing. | Same as field type |
| Elevation | elevation | rad | fp32_t | Target’s elevation. | Same as field type |
USBL Position¶
This message contains information, collected using USBL, about a target’s position.
- Abbreviation: UsblPosition
- Identification Number: 891
- Payload Size: 14 bytes
- Message Size: 36 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | uint16_t | Target’s IMC address. | Same as field type |
| X | x | m | fp32_t | X coordinate of the target in the local device’s reference frame. | Same as field type |
| Y | y | m | fp32_t | Y coordinate of the target in the local device’s reference frame. | Same as field type |
| Z | z | m | fp32_t | Z coordinate of the target in the local device’s reference frame. | Same as field type |
USBL Fix¶
This message contains the WGS-84 position of a target computed using USBL.
- Abbreviation: UsblFix
- Identification Number: 892
- Payload Size: 23 bytes
- Message Size: 45 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | uint16_t | Target’s IMC address. | Same as field type |
| Latitude (WGS-84) | lat | rad | fp64_t | WGS-84 Latitude. | min=-1.5707963267948966, max=1.5707963267948966 |
| Longitude (WGS-84) | lon | rad | fp64_t | WGS-84 Longitude. | min=-3.141592653589793, max=3.141592653589793 |
| Z Units | z_units | Enumerated (Enum Z Units) | uint8_t | Units of the z reference. | Same as field type |
| Z Reference | z | m | fp32_t | Target reference in the z axis. Use z_units to specify whether z represents depth, altitude or other. | Same as field type |
Parameters XML¶
Message containing the parameters XML of the source system.
- Abbreviation: ParametersXml
- Identification Number: 893
- Payload Size: 4+ bytes
- Message Size: 26+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Locale | locale | - | plaintext | The locale used to produce this parameters XML. | Same as field type |
| Configuration Data | config | - | rawdata | The parameters XML file compressed using the GNU zip (gzip) format. | Same as field type |
Get Parameters XML¶
Request the destination system to send its parameters XML file via a Parameters XML message.
- Abbreviation: GetParametersXml
- Identification Number: 894
- Payload Size: 0 bytes
- Message Size: 22 bytes
This message has no fields.
Set Image Coordinates¶
Message containing the x and y coordinates of object to track in remote peer.
- Abbreviation: SetImageCoords
- Identification Number: 895
- Payload Size: 5 bytes
- Message Size: 27 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Camera Identifier | camId | - | uint8_t | Camera identifier. | Same as field type |
| X | x | px | uint16_t | X coordinate of the target in the image frame. | Same as field type |
| Y | y | px | uint16_t | Y coordinate of the target in the image frame. | Same as field type |
Get Image Coordinates¶
Message containing the x and y coordinates of object to track in image slave.
- Abbreviation: GetImageCoords
- Identification Number: 896
- Payload Size: 5 bytes
- Message Size: 27 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Camera Identifier | camId | - | uint8_t | Camera identifier. | Same as field type |
| X | x | px | uint16_t | X coordinate of the target in the image frame. | Same as field type |
| Y | y | px | uint16_t | Y coordinate of the target in the image frame. | Same as field type |
Get World Coordinates¶
Message containing the x, y and z coordinates of object in the real world.
- Abbreviation: GetWorldCoordinates
- Identification Number: 897
- Payload Size: 29 bytes
- Message Size: 51 bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Tracking | tracking | Enumerated (Enum Boolean Value) | uint8_t | True when system is tracking. | Same as field type |
| Latitude | lat | rad | fp64_t | Latitude of the real world frame origin. | Same as field type |
| Longitude | lon | rad | fp64_t | Longitude of the real world frame origin. | Same as field type |
| X | x | m | fp32_t | X offsets of the target in the real world frame. | Same as field type |
| Y | y | m | fp32_t | Y offsets of the target in the real world frame. | Same as field type |
| Z | z | m | fp32_t | Z offsets of the target in the real world frame. | Same as field type |
USBL Angles Extended¶
This message contains information, collected using USBL, about the bearing and elevation of a target.
- Abbreviation: UsblAnglesExtended
- Identification Number: 898
- Payload Size: 34+ bytes
- Message Size: 56+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | plaintext | Target’s system name. | Same as field type |
| Local Bearing | lbearing | rad | fp32_t | Target’s bearing in the local device’s reference frame. | Same as field type |
| Local Elevation | lelevation | rad | fp32_t | Target’s elevation in the local device’s reference frame. | Same as field type |
| Bearing | bearing | rad | fp32_t | Target’s bearing in the navigation reference frame. | Same as field type |
| Elevation | elevation | rad | fp32_t | Target’s elevation in the navigation reference frame. | Same as field type |
| Roll Angle | phi | rad | fp32_t | Rotation around the device longitudinal axis. | min=-3.141592653589793, max=3.141592653589793 |
| Pitch Angle | theta | rad | fp32_t | Rotation around the device lateral or transverse axis. | min=-1.57079632679490, max=1.57079632679490 |
| Yaw Angle | psi | rad | fp32_t | Rotation around the device vertical axis. | min=-3.141592653589793, max=3.141592653589793 |
| Accuracy | accuracy | rad | fp32_t | Accuracy of the fix. | min=0, max=3.141592653589793 |
USBL Position Extended¶
This message contains information, collected using USBL, about a target’s position.
- Abbreviation: UsblPositionExtended
- Identification Number: 899
- Payload Size: 42+ bytes
- Message Size: 64+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | plaintext | Target’s system name. | Same as field type |
| X | x | m | fp32_t | X coordinate of the target in the local device’s reference frame. | Same as field type |
| Y | y | m | fp32_t | Y coordinate of the target in the local device’s reference frame. | Same as field type |
| Z | z | m | fp32_t | Z coordinate of the target in the local device’s reference frame. | Same as field type |
| N | n | m | fp32_t | X coordinate of the target in the navigation reference frame. | Same as field type |
| E | e | m | fp32_t | Y coordinate of the target in the navigation reference frame. | Same as field type |
| D | d | m | fp32_t | Z coordinate of the target in the navigation reference frame. | Same as field type |
| Roll Angle | phi | rad | fp32_t | Rotation around the device longitudinal axis. | min=-3.141592653589793, max=3.141592653589793 |
| Pitch Angle | theta | rad | fp32_t | Rotation around the device lateral or transverse axis. | min=-1.57079632679490, max=1.57079632679490 |
| Yaw Angle | psi | rad | fp32_t | Rotation around the device vertical axis. | min=-3.141592653589793, max=3.141592653589793 |
| Accuracy | accuracy | m | fp32_t | Accuracy of the position fix. | min=0 |
USBL Fix Extended¶
This message contains the WGS-84 position of a target computed using USBL.
- Abbreviation: UsblFixExtended
- Identification Number: 900
- Payload Size: 27+ bytes
- Message Size: 49+ bytes
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Target | target | - | plaintext | Target’s system name. | Same as field type |
| Latitude (WGS-84) | lat | rad | fp64_t | WGS-84 Latitude. | min=-1.5707963267948966, max=1.5707963267948966 |
| Longitude (WGS-84) | lon | rad | fp64_t | WGS-84 Longitude. | min=-3.141592653589793, max=3.141592653589793 |
| Z Units | z_units | Enumerated (Enum Z Units) | uint8_t | Units of the z reference. | Same as field type |
| Z Reference | z | m | fp32_t | Target reference in the z axis. Use z_units to specify whether z represents depth, altitude or other. | Same as field type |
| Accuracy | accuracy | m | fp32_t | Accuracy of the position fix. | min=0 |